
www.przemysl-polska.com
29
'14
Written on Modified on
Standard CAN FD wyzwaniem dla sieci fieldbus i przemysłowego Ethernetu w maszynach specjalistycznych
CAN FD daje możliwość wykorzystania istniejących systemów CAN oraz posiadanej wiedzy na temat tego standardu również w instalacjach o dużych wymaganiach odnośnie liczby węzłów sieciowych, szybkości transmisji i czasów trwania cykli. Thomas Waggershauser z firmy HMS wyjaśnia w jaki sposób.
Zastosowania CAN FD
Stale rosnące wymagania odnośnie liczby węzłów w systemie, szybkości transmisji i czasu trwania cykli prowadzą do powstawania zatorów, którym nie są w stanie sprostać tradycyjne szyny CAN ze względu na swoje ograniczenia (8 bajtów, 1 Mbit/s). Wynika to przede wszystkim z szybkości transmisji uzależnionej od stopnia rozbudowy sieci oraz krótkich paczek dla usług i danych analogowych.
W codziennej praktyce wspomniane ograniczenia są często omijane przez przyjmowanie kompromisów. Konieczność podziału systemu na wiele segmentów sieciowych lub nawet na sieci równoległe oznacza wyczerpywanie się potencjału obecnej technologii CAN, prowadzące często do powstawania struktur skomplikowanych i drogich w konfiguracji i utrzymaniu. Można byłoby w ich miejsce zastosować przemysłową sieć Ethernet, jednak całkowita zmiana struktury danych i sposobu konfiguracji, zwłaszcza w systemach z kontrolą czasową byłaby dużym wyzwaniem i wymagałaby poniesienia sporych kosztów – zwłaszcza w przypadku sieci rozłożonych na znacznej przestrzeni. Konieczność wymiany wszystkich narzędzi do instalacji i serwisowania jest dodatkowym czynnikiem zniechęcającym do tego typu inwestycji. Ponadto, użytkownicy preferują wykorzystanie posiadanego już know-how w użyteczny sposób.
Tu właśnie pojawia się potencjalne pole zastosowań dla nowego standardu. CAN FD (CAN with flexible data rate), będący rozszerzeniem „klasycznego” standardu CAN, został zaprezentowany przez firmę Bosch w 2012 roku. Pozwala znacząco zwiększyć użyteczną szybkość transmisji i rozmiar paczki danych. Zachowuje przy tym wypróbowaną i przetestowaną koncepcję pracy sieci CAN: arbitraż bazujący na identyfikatorach wiadomości, rozsyłanie komunikatów kierowane zdarzeniami oraz potwierdzanie otrzymanych wiadomości za pomocą specjalnego bitu.
Większa szybkość transmisji
Potwierdzanie otrzymania wiadomości przez odbiorniki, stosowane w klasycznych sieciach CAN, pozwala równocześnie potwierdzić integralność informacji znajdującej się wewnątrz przesłanego pakietu. Potencjalne błędy są dzięki temu wykrywane natychmiast, co pozwala bardzo szybko przeprowadzić retransmisję danych.
Arbitraż wiadomości bazujący na identyfikatorach CAN również stanowi ważną zaletę dla aplikacji sterujących, pozwalając unikać kolizji podczas transmisji danych i zapewniając krótkie czasy opóźnień dla wiadomości o wysokim priorytecie, nawet przy mocno obciążonej szynie.
Z kolei niedogodnością przyjętych metod jest to, że w momencie próbkowania na szynach podłączonych do wszystkich węzłów musi być zapewniony jednakowy poziom logiczny w celu uniknięcia błędów. Zgodnie z tą zasadą, interwał bitowy musi zapewnić wystarczający czas propagacji sygnału pomiędzy dwoma skrajnymi węzłami sieci, wliczając w to ich czasy aktywacji szyny. Tak więc interwał bitowy, a w konsekwencji również szybkość transmisji są bezpośrednio uzależnione od stopnia rozbudowy sieci; przy odległości między skrajnymi węzłami wynoszącej 40 m można uzyskać szybkość transmisji do 1 Mbit/s, ale już przy 250 m zmniejsza się ona do 250 kbit/s.
Aby w istotnym stopniu zwiększyć szybkość transmisji bez zmiany istniejącej technologii komunikacyjnej, w standardzie CAN FD przyjęto dwie różne prędkości bitowe. „Arbitration rate” czyli prędkość arbitrażu dla komend sterujących (arbitraż, typ wiadomości, znacznik końca, potwierdzenie) zależy od szybkości propagacji, czyli w konsekwencji od stopnia rozbudowy sieci. Z kolei „data bit rate” czyli prędkość danych może być opcjonalnie wykorzystana dla transmisji danych i informacji zapewniających ich integralność. W tym przedziale czasu jedynie nadajnik steruje szyną co oznacza, że nie jest konieczne bezpośrednie sprzężenie zwrotne. Maksymalna, możliwa do uzyskania szybkość transmisji zależy tu jedynie od charakterystyki medium transmisyjnego, a nie od propagacji sygnału. W obecnych realizacjach CAN FD do zastosowań produkcyjnych uzyskuje się szybkość transmisji do 8 Mbit/s, natomiast teoretyczna granica przepustowości dla CAN FD wynosi 15 Mbit/s.
Dwie różne szybkości transmisji są wybierane niezależnie od siebie przez kontroler CAN FD korzystający z dwubitowych rejestrów czasowych. Przełączanie między nimi odbywa się za pomocą dwóch bitów sterujących w protokole. Pierwszy z nich, wcześniej zarezerwowany jest teraz wykorzystywany jako bit „Extended Data Length” (EDL) i definiuje wiadomość CAN FD. Rzeczywistym przełączaniem szybkości transmisji steruje nowo dodany bit „Bit Rate Switch” (BRS), przełączający transceiver do pracy z większą prędkością bitową podczas próbkowania. Przełączenie powrotne następuje przy próbkowaniu pola CRC.
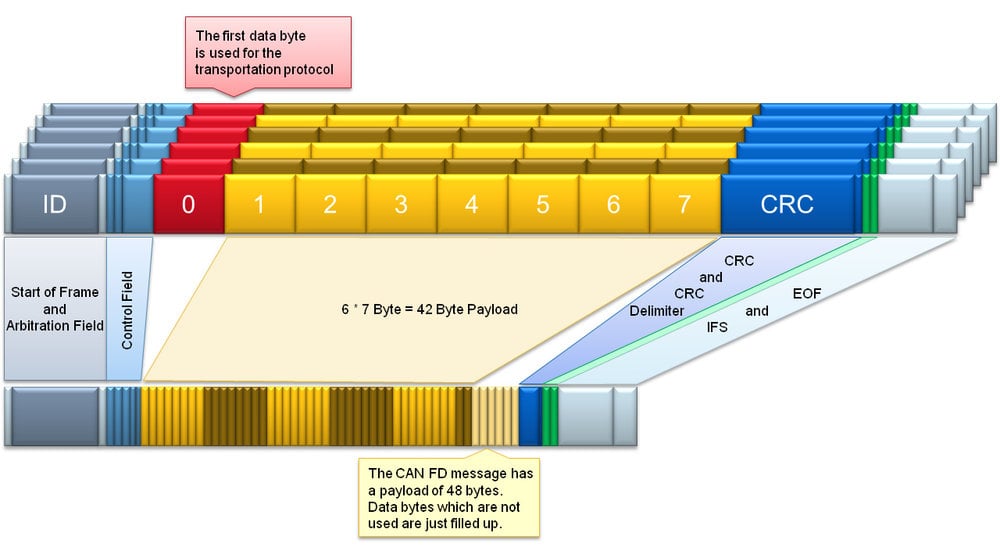
Rys. 1. Zalety CAN FD – 1
W tym przykładzie przesyłane są 42 bajty konfiguracyjne. Do realizacji tego w przypadku szyny CAN niezbędne jest zaimplementowanie protokołu transportowego umożliwiającego przesłanie wszystkich danych w wiadomościach 8-bajtowych. Przykład ten bazuje na protokole transportowym, w którym pierwszy bajt jest wykorzystywany do kontroli strumienia danych. Oznacza to, że dla każdej z wiadomości CAN dostępnych jest do 7 pozostałych bajtów. W zależności od zaimplementowanego protokołu transportowego do kontroli mogą być też konieczne dodatkowe pola danych. Pod widoczną na rysunku strukturą wiadomości umieszczono dla porównania pojedynczą wiadomość CAN FD. Jak widać, pojedyncza wiadomość CAN FD z 48 bajtami danych użytkownika może zastąpić 6 klasycznych wiadomości CAN. Ponieważ dane CAN FD są dodatkowo transmitowane z większą prędkością bitową, przesłanie wiadomości CAN FD wymaga znacznie mniej czasu niż w standardzie CAN. Co więcej, wykorzystanie w tym przykładzie pojedynczej wiadomości CAN FD znacznie upraszcza administrację strumieniem danych.
Rozszerzone dane użytkownika
Dane sterujące są w dalszym ciągu przesyłane z małą prędkością bitową typową dla CAN, jednak dzięki powiększeniu obszaru danych użytkownika do 64 bajtów, więcej danych może być przesłanych przy dużej prędkości bitowej, co zwiększa efektywną szybkość transmisji.
W standardzie CAN blok danych ma długość jedynie 8 bajtów, co w chwili obecnej przestaje być wystarczające w niektórych aplikacjach, np. przy transmisji wartości analogowych o dużej precyzji czy też przy sterowaniu wieloosiowych robotów, biorąc pod uwagę różnorodność ich danych i komend sterujących. Wymaga ponadto dodania danych serwisowych, co dotąd znacznie redukowało efektywność transmisji ze względu na protokoły transportowe wymagane do przesłania więcej niż 8 bajtów.
CAN FD daje możliwość wykorzystania do 64 bajtów danych, co pozwala na umieszczenie więcej informacji w pojedynczej wiadomości. Ma to znaczenie zwłaszcza w przypadku sterowania bardziej złożonych urządzeń, wymagających obecnie przesłania tylko jednej wiadomości procesowej. Wymogi odnośnie protokołów transportowych dla danych serwisowych zostały zredukowane, jako że często do przesłania danych konfiguracyjnych wystarcza pojedyncza wiadomość CAN FD.
Aby wyeliminować niepotrzebne wydłużanie pola danych sterujących, CAN FD wykorzystuje jedynie 4 bity do kodowania długości pola danych. Wartości od 0 do 8 odpowiadają klasycznej szynie CAN. Wartości dotąd niezdefiniowane (dla bitów od 9 do 15, czyli 1001 do 1111) są wykorzystywane do kodowania nowej, wydłużonej długości pola danych: oprócz standardowych 0…8 bajtów dostępne są dodatkowe wartości dla danych użytkownika wynoszące 12, 16, 20, 24, 32, 48 i 64 bajty. Inne długości pola danych poza podanymi tu są niedopuszczalne, dlatego też ewentualne niewykorzystywane obszary są wypełniane bitami uzupełniającymi.
Oprócz większej prędkości bitowej w obszarze danych, użyteczna szybkość transmisji może być znacznie zwiększona w przypadku CAN FD, a czas cyklu znacznie skrócony. Sieć CAN FD o prędkości bitowej w fazie arbitrażu wynoszącej 500 kbit/s, prędkości bitowej w fazie transmisji danych 5 Mbit/s i długości pola danych wynoszącego 64 bajty pozwala uzyskać efektywną szybkość transmisji powyżej 4 Mbit/s.
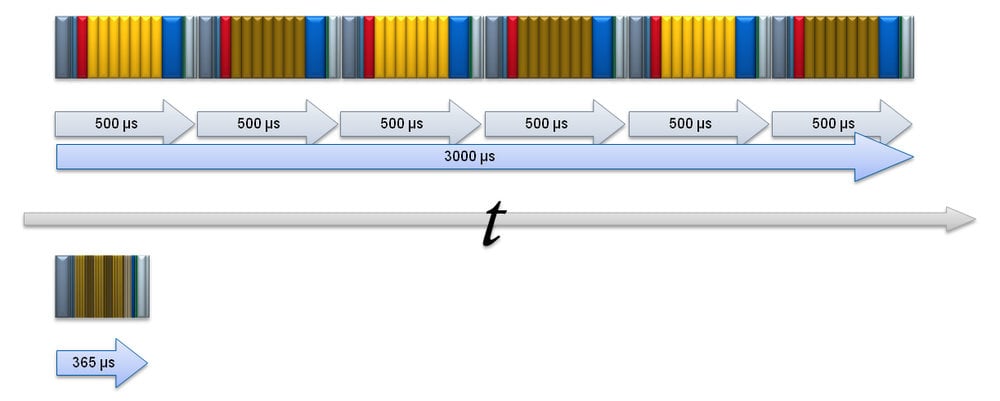
Rys. 2. Zalety CAN FD – 2
Ten rysunek przedstawia wiadomości CAN z rysunku 1 umieszczone na tej samej osi czasu. Dla klasycznej szyny CAN przyjęto tu prędkość bitową równą 250 kBit/s. Dla wiadomości obejmującej 8 bitów danych użytkownika (1 bajt dla protokołu transportowego i 7 bajtów dla danych w tym przykładzie) oraz maksymalnej liczby bitów dopełniających, przesłanie klasycznej wiadomości CAN wymaga przejęcia szyny CAN przez około 500 μs. Jeśli węzeł transmisyjny jest w stanie przesłać wszystkie 6 wiadomości bezpośrednio po sobie bez opóźnień, szyna będzie zablokowana przez 3 ms konieczne do przesłania 42 bajtów danych użytkownika. Dla porównania, wiadomość w standardzie CAN FD zawierająca 48 bajtów danych, przesyłana przy prędkości bitowej fazy arbitrażu wynoszącej 250 kbit/s i prędkości bitowej danych wynoszącej 2 Mbit/s blokuje szynę tylko przez około 365 μs – również przy maksymalnej liczbie bitów dopełniających. Znacznie szybsza transmisja danych poprawia właściwości systemów CAN przy pracy w czasie rzeczywistym dzięki krótszym czasom odpowiedzi, a jednocześnie zmniejsza złożoność administracji danymi.
Systemy czasu rzeczywistego
Możliwość łączenia wielu niezależnych pakietów danych w jedną wiadomość oznacza znacznie prostszą administrację danymi, ponieważ poszczególne wiadomości nie muszą już być wzajemnie ze sobą synchronizowane. Większa prędkość bitowa w fazie transmisji danych pozwala na przesłanie 8-krotnie większego pakietu (64 bajty) w czasie porównywalnym z przesłaniem 8-bajtowej wiadomości za pomocą klasycznej szyny CAN. Dzięki temu wiadomości o wysokim priorytecie mogą być transmitowane znacznie szybciej, co poprawia właściwości sieci w systemach czasu rzeczywistego.
Bezpieczeństwo danych
Ważnym zagadnieniem jest bezpieczeństwo danych. Pomimo zwiększenia rozmiarów pakietu danych w porównaniu z klasyczną szyną CAN, standard CAN FD oferuje ten sam poziom bezpieczeństwa. Zapewniono to między innymi poprzez zastosowanie dłuższego klucza do kontroli CRC z zaadaptowanymi algorytmami. W zależności od ilości przesyłanych danych wykorzystywany jest jeden z trzech różnych algorytmów CRC, dotychczasowy w przypadku wiadomości zawierających do 8 bajtów danych lub jeden z dwóch rozszerzonych: dla wiadomości zawierających do 16 bajtów lub powyżej 16 bajtów danych. Wybór konkretnego algorytmu przez kontroler CAN następuje w oparciu o liczbę bajtów w wiadomości.
Dla zapewnienia jeszcze większego bezpieczeństwa danych, w standardzie zaimplementowano dodatkowe propozycje. W rezultacie tego, pole CRC w wiadomości CAN FD zawsze rozpoczyna się bitem dopełniającym. Po 5 bitach danych wstawiany jest kolejny bit dopełniający, przy czym w odróżnieniu od zasady wstawiania bitów dopełniających obowiązującej dla szyny CAN, jego wartość nie zależy od wartości kilku bitów poprzedzających. Stanowi on komplementarną wartość jedynie dla pojedynczego bitu poprzedzającego.
Kompatybilność oddolna
Wadą wynikającą z przejścia od standardu CAN do szybszych systemów komunikacyjnych jest wymóg dokonania całkowitej konwersji: wszystkie urządzenia dołączone do szyny CAN muszą zostać zaadaptowane do nowego standardu, np. EtherCAT. Alternatywnie, kontroler musi zostać rozszerzony o możliwość obsługi wielu rodzajów sieci. Obie te metody mają swoje wady i zalety. Jednak w przypadku CAN FD pozostaje do wyboru jeszcze jedna, „łagodniejsza” opcja. Ponieważ kontrolery CAN FD mogą być używane jako klasyczne węzły CAN, istnieje możliwość ich stopniowego zastępowania nowymi węzłami kompatybilnymi z CAN FD. Gdy cała sieć jest już kompatybilna z CAN FD, zalety tego standardu mogą być wykorzystane w pełnym zakresie. Jest to szczególnie interesująca opcja w przypadku maszyn specjalistycznych, gdzie często stosowane są urządzenia wykonywane na zamówienie i nie ma możliwości szybkiej wymiany węzła na inny, zgodny z CAN FD.
Narzędzia dostępne dla CAN FD
Na rynku dostępnych jest szereg narzędzi ułatwiających projektowanie urządzeń i sieci CAN FD, w szczególności karty interfejsowe PC-CAN FD dla różnych rodzajów interfejsów stosowanych w komputerach PC. Przykładem mogą tu być karty IXXAT CAN-IB 500/600 PCIe produkowane przez HMS Networks. Producent dołącza do nich zestawy sterowników dla Windows, Linux i innych systemów operacyjnych, ułatwiające instalację kart w istniejących systemie oraz pozwalające na szybkie przystosowywanie istniejących pakietów oprogramowania do współpracy z sieciami CAN FD.
Poza interfejsami sprzętowymi z odpowiednimi sterownikami, do efektywnej implementacji CAN FD niezbędne są też narzędzia testowe i analityczne. Oferta firmy HMS w tym zakresie wkrótce powiększy się o znane narzędzie IXXAT canAnalyser w wersji z obsługą CAN FD.
Zastosowania CAN FD w sektorze przemysłowym
Poza niezbędnymi narzędziami wspomnianymi w poprzednim akapicie, wykorzystanie CAN FD w środowiskach produkcyjnych wiąże się z kilkoma ważnymi aspektami. Zalecane jest tu korzystanie ze standaryzowanych protokołów wyższego rzędu w aplikacjach przemysłowych: organizacja CiA (CAN in Automation) pracuje nad konwersją protokołu CANopen dla CAN FD. Wkrótce ma być dostępna specyfikacja CANopen V5 z rozszerzeniami dla CAN FD.
Kolejnym ważnym aspektem przy korzystaniu z CAN FD jest dostępność tanich mikrokontrolerów ze zintegrowanym kontrolerem CAN/CAN FD. Układy dostępne dotąd w większości przypadków wykorzystują matrycę FPGA z blokiem IP realizującym obsługę CAN FD. Mikrokontrolery ze zintegrowanym kontrolerem CAN FD to najczęściej układy klasy high-performance z wieloma rdzeniami CPU, przeznaczone do realizacji złożonych funkcji w elektronice samochodowej. Do momentu, gdy na rynku nie pojawią się tanie mikrokontrolery z obsługą CAN FD, najbardziej elastycznym rozwiązaniem pozostaną wspomniane układy FPGA.
Perspektywy
CAN FD rozszerza obszar zastosowań urządzeń z wbudowaną szyną CAN, wprowadzając możliwość transmisji danych ze znacznie większą szybkością, prostą konfigurację i zachowanie opcji analitycznych znanych z klasycznych szyn fieldbus. Zbliżająca się możliwość wykorzystania protokołu CANopen w sieciach CAN FD oznacza, że nowe systemy sieciowe będą mogły znaleźć zastosowanie w sektorze przemysłowym, oferując możliwość transmisji danych z szybkością od 100 kbit/s do 5 Mbit/s. Dzięki opcjom szybszej transmisji i większej ilości przesyłanych informacji, CAN FD stanowi idealne rozwiązanie jako adaptowalny system fieldbus dla maszyn specjalistycznych.


Autor: Thomas Waggershauser,
dyrektor sprzedaży w IXXAT Automation GmbH, oddziale HMS Group
dyrektor sprzedaży w IXXAT Automation GmbH, oddziale HMS Group
