
Technologie czujników w pojazdach autonomicznych
Artykuł Marka Patricka, Mouser Electronics.
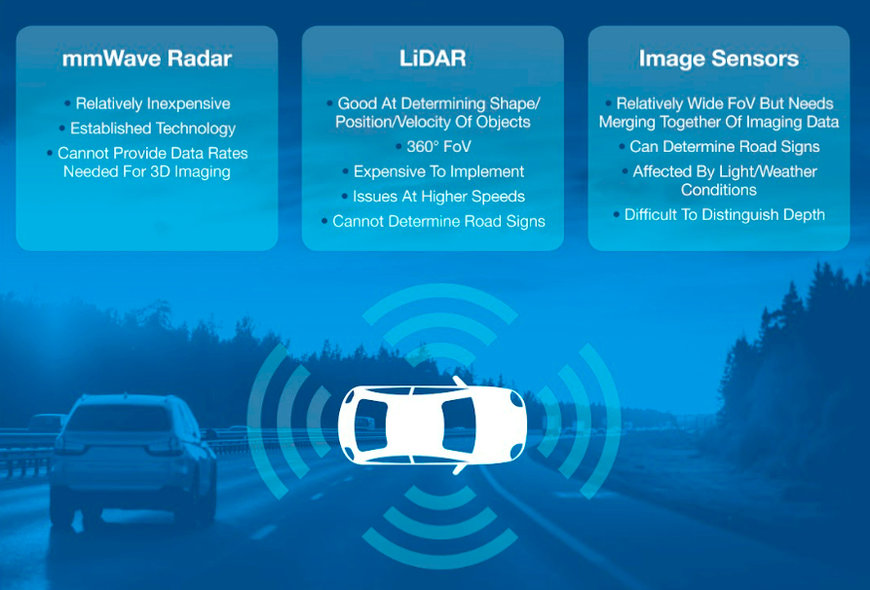
Różne technologie czujników wykorzystywane w pojazdach autonomicznych i ich cechy
Co zawiera ten cykl artykułów?
- Jak technologie jazdy autonomicznej zmieniają krajobraz motoryzacji
- Przełamywanie wyobrażeń i wdrażanie technologii pojazdów samosterujących
- Autonomiczność pojazdów: kluczowe poziomy
- Technologie czujników w pojazdach autonomicznych
- Dostarczanie danych krytycznych czasowo dla pojazdów autonomicznych przez systemy V2V i V2I
- Ustalanie ram etycznych dla pojazdów autonomicznych
Czujniki kluczowymi technologiami w pojazdach autonomicznych
Aby samochód autonomiczny mógł bezpiecznie się poruszać, musi w pełni pojmować swoje otoczenie. Bez tej wiedzy pojazdy samojezdne nigdy nie osiągną celów związanych z bezpieczeństwem ruchu drogowego, jakich oczekuje od nich społeczeństwo. Zaspokojenie oczekiwań pasażerów i złagodzenie społecznych obaw związanych z pojazdami autonomicznymi zależy również od tego, czy systemy będą miały świadomość otoczenia w zakresie 360 stopni.
Aby pojazd mógł „widzieć”, potrzebuje dwóch kluczowych technologii. Pierwszą są różnego rodzaju czujniki, które elektronicznie wykrywają obiekty, ich położenie względem pojazdu oraz, jeśli się poruszają, ich prędkość. Druga to komputerowe algorytmy uczenia maszynowego, które muszą przetworzyć dane uzyskane z czujników, aby określić kluczowe parametry dotyczące obiektu, który widzą czujniki.
Czy tym obiektem jest inny samochód, znak drogowy, a może pieszy? Dla każdej klasy obiektów istnieje zestaw powiązanych parametrów, które systemy sterowania pojazdu muszą znać. Wiele z tych technologii działa już w pewnym zakresie jako zaawansowane systemy wspomagania kierowcy (ADAS), lecz do uzyskania pełnej autonomiczności potrzebne są bardziej zaawansowane czujniki.
Podstawowe technologie czujników
Kluczowe do poznawania otaczającego świata przez pojazd autonomiczny są trzy technologie czujników: lidar, radar i kamery.
Radar wykorzystują już takie funkcje systemów ADAS jak hamowanie awaryjne i adaptacyjny tempomat. Nadal będzie on zapewniał kluczową funkcję wykrywania dla wielu zadań przy różnych prędkościach pojazdu, na przykład przy automatycznym parkowaniu, zmianie pasa ruchu na autostradzie lub w wolno posuwającym się ruchu. Najnowsze moduły radarowe działają na falach milimetrowych (mmWave), zazwyczaj o częstotliwości 77 GHz, i mogą szybko wykryć odległość, prędkość i kąt ruchu wielu obiektów, niezależnie od warunków pogodowych.
Te najnowsze moduły są niewielkie i niedrogie, a dzięki sprawdzonym możliwościom techniki radarowej stanowią niezawodną technologię pomiarową. Radar ma jednak pewne ograniczenia, a jednym z nich jest ilość danych o obiektach i szybkość ich dostarczania.
Lidar działa podobnie do radaru, lecz zamiast fal milimetrowych wykorzystuje impulsy światła ze źródła laserowego. Potrafi skanować w trzech wymiarach miliony razy na sekundę, aby szybko zbudować wirtualną mapę otoczenia pojazdu. Technologia lidarowa jest coraz częściej stosowana przez producentów pojazdów w samochodach autonomicznych, ponieważ umożliwia tworzenie dynamicznego widoku ogólnego, który obejmuje kształt i głębokość obiektów, takich jak pojazdy, piesi i znaki drogowe. Lidar jako technologia czujnikowa jest uzupełnieniem radaru, a obie są przeznaczone do konkretnych zastosowań.
Przykładem lidaru może być Velodyne Alpha Prime, 128-kanałowy czujnik o wysokiej rozdzielczości, z polem widzenia 360 stopni w poziomie i 40 stopni w pionie, zasięgiem wykrywania do 300 m i rozdzielczością +/- 3 cm. Dzięki częstotliwości odświeżania obrazu do 20 kHz może dostarczyć do 4,6 mln punktów danych o obiektach na sekundę. Velodyne Lidar nieustannie rozwija czujniki nowej generacji, a wśród klientów z branży motoryzacyjnej są Ford, Honda, Tesla i Mercedes-Benz.
Lidar i radar dostarczają wielu szczegółów, które mogą być wykorzystane przez systemy nawigacyjne pojazdu, lecz nie spełniają wszystkich wymagań. Pewne zadania związane z wykrywaniem obrazów wymagają bardziej złożonej interpretacji obserwowanego obrazu – na przykład rozpoznawanie znaków drogowych. Do realizacji tego typu zadań potrzebne są kamery o wysokiej rozdzielczości. Umieszczając kamery z obiektywem szerokokątnym z przodu, po bokach i z tyłu pojazdu można uzyskać 360-stopniowe pole widzenia w czasie rzeczywistym.
Takie podejście pozwala zmniejszyć ryzyko wystąpienia martwych punktów, dzięki czemu, łącząc dane z lidaru i radaru, samochody autonomiczne będą miały w pełni reprezentatywny obraz, na którym będą mogły opierać swoje decyzje nawigacyjne.
Jak mówiliśmy w uprzednim artykule, „Autonomiczność pojazdów: kluczowe poziomy”, osiągnięcie pełnej autonomiczności (poziom 5 wg SAE) wymaga, aby pojazd był w stanie samodzielnie prowadzić się przy każdej prędkości, we wszelkich warunkach pogodowych, bez jakiejkolwiek pomocy człowieka. Realizacja tego celu jest całkowicie uzależniona od wielu czujników, które w czasie rzeczywistym obserwują nie tylko drogę przed pojazdem, lecz także wszystko, co go otacza – od pieszych po elementy wyposażenia ulic. W bieżącym artykule wymieniliśmy trzy główne technologie czujników, z których korzystają pojazdy autonomiczne – z czasem jednak rozwiną się inne technologie czujników, które będą je uzupełniać.
Kolejnym krytycznym aspektem projektowania pojazdów autonomicznych będzie wprowadzenie nadmiarowych systemów i czujników, tak aby awaria jednego z nich nie uniemożliwiła bezpiecznego działania całego pojazdu. Rzecz jasna zapewnienie nadmiarowości wiąże się z kosztami, ale najważniejsza jest pewność, że pojazdy nie będą stanowić zagrożenia dla ludzkiego życia.
www.mouser.com
