
www.przemysl-polska.com
12
'23
Written on Modified on
Bezpieczniejsze dynamiczne interakcje
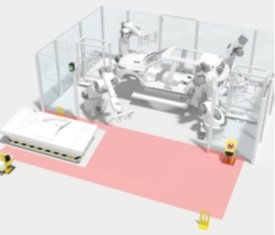
Podczas zautomatyzowanego przeładunku materiałów między komórką robota a pojazdem kierowanym automatycznie, należy uniemożliwić niepostrzeżone wejście osób do strefy niebezpiecznej. Innowacyjne rozwiązanie Leuze zabezpiecza stacje przeładunkowe za pomocą dynamicznej korekty pola ochronnego. Dzięki temu stają się zbędne dodatkowe środki bezpieczeństwa, takie jak bariery i ogrodzenia.
Pełna automatyzacja bez ryzyka
W inteligentnych fabrykach przepływ towarów jest całkowicie zautomatyzowany. Oznacza to, że materiały do produkcji w przygotowanych pojemnikach są udostępniane na miejscach przeładunku, często nazywanych w Niemczech supermarketami. Powiadomienia o zapotrzebowaniu na materiały są wysyłane w formie cyfrowej bezpośrednio z obszaru produkcji. Pojazdy kierowane automatycznie (AGV) wykorzystuje się do dostarczania wymaganych podzespołów do komórek robotów i odbierania przetworzonych komponentów. Tam gdzie pojazdy AGV wchodzą w interakcję z komórkami robotów zautomatyzowane procesy na stacjach przeładunkowych muszą być zaprojektowane tak, aby były zarówno wolne od ryzyka, jak i wydajne. Można to osiągnąć tylko dzięki niezawodnym rozwiązaniom bezpieczeństwa: Pojazdy AGV przejeżdżają strefy niebezpieczne bez przerywania pracy w komórkach robotów, a ludzie w żadnym razie nie mogą wejść do tych obszarów niezauważeni. Dlatego też specjaliści ds. czujników z Leuze opracowali innowacyjną koncepcję bezpieczeństwa, która jest dostosowana do wymagań stacji przeładunkowych w inteligentnych środowiskach produkcyjnych. Podejście to opiera się na dynamicznej korekcie pola ochronnego wokół pojazdu AGV podczas transportu materiałów.
Systemy muszą być kompatybilne
Zautomatyzowany transfer materiałów między pojazdem AGV a robotem wymaga kompleksowego spojrzenia na funkcje bezpieczeństwa na stacjach przeładunkowych. Obejmuje to wjazd pojazdu AGV do stacji, dojazd do pozycji transferu oraz opuszczenie obszaru stacji. Same pojazdy AGV posiadają zabezpieczenia w postaci wbudowanych czujników, na przykład laserowych skanerów bezpieczeństwa. Komórki robotów są wyposażone w czujniki, które rozpoznają, czy osoba zbliża się do obszaru roboczego w strefie zagrożenia. Jednak w przypadku zautomatyzowanego przeładunku materiału między pojazdem AGV a robotem, różne jednostki sterujące systemów biorących udział w procesie (komórka robota, AGV i sterowanie przepływem materiału) muszą mieć możliwość komunikowania się między sobą. Co więcej, muszą one być zestrojone w taki sposób, aby zagwarantować bezpieczeństwo i niezawodność podczas całego cyklu. Można to osiągnąć tylko poprzez ścisłą koordynację między wieloma współpracującymi działami. Oprócz zakładowych planistów, kierowników ds. logistyki oraz specjalistów ds. BHP, na tym etapie w znacznym stopniu do sukcesu przyczynia się również dział IT.
Wymagania dla w pełni zautomatyzowanych przeładunków
W tradycyjnym podejściu do ochrony dostępu do obszaru przeładunku między AGV a komórką robota często wykorzystywane są kurtyny świetlne. Chociaż jest to technicznie wykonalne, ma ograniczone możliwości: nie można automatycznie monitorować obecności osób w obszarze przeładunku. Aby utrzymać ludzi z dala od strefy zagrożenia, te klasyczne koncepcje wymagają dalszych zabezpieczeń – takich jak środki mechaniczne, np. ogrodzenia i bariery. Rozwiązaniem bardziej wydajnym jest w pełni zautomatyzowany, bezpieczny transfer bez barier fizycznych pomiędzy pojazdami AGV a komórkami robotów. System musi jednak być w stanie bezbłędnie odróżniać ludzi od pojazdów AGV. W przypadku przyjęcia tej koncepcji muszą być spełnione następujące warunki:
• Strefa niebezpieczna stacji przeładunkowej AGV musi być zabezpieczona podczas całego procesu.
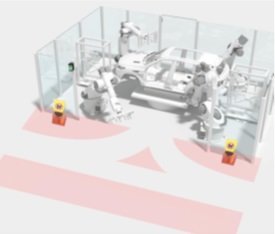
• Zdefiniowane pojazdy AGV powinny być w stanie przemieszczać się i opuszczać obszar roboczy równolegle do osi scieżki (opcjonalnie: również po łuku) w sposób w pełni zautomatyzowany.
• Osoby lub inne nieregularności w stosunku do zdefiniowanego konturu AGV muszą być każdorazowo rozpoznawane, wyzwalając bezpieczny sygnał zatrzymania.
AGV w polach ochronnych
Rozwiązanie do zabezpieczania stacji przeładunkowych robotów/pojazdów AGV opracowane przez Leuze gwarantuje dwie funkcje bezpieczeństwa:
• Zatrzymanie niebezpiecznego ruchu w komórce robota
• Dynamiczną korektę pól ochronnych wokół AGV
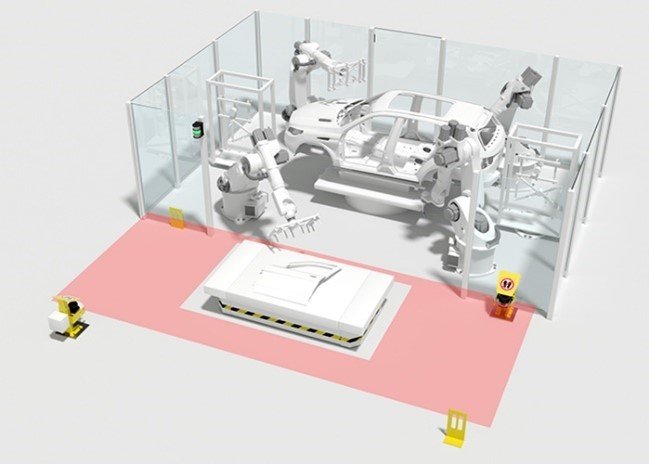
Do zabezpieczenia całego obszaru stacji przeładunkowej, Leuze stosuje laserowe skanery bezpieczeństwa. Wykorzystują one pola ochronne do wykrywania wejścia oraz obecności osób w obszarze stacji przeładunkowej. W razie zaistnienia takiej sytuacji system generuje sygnał zatrzymania. W zachodzącym równolegle procesie w monitorowanej strefie nieustannie kontroluje się pozycję pojazdu AGV. Oprogramowanie bezpieczeństwa maskuje kontury pojazdu, aby w strefie chronionej nie wyzwalał sygnału zatrzymania. W ten sposób pole ochronne dynamicznie jest korygowane wokół poruszającego się pojazdu AGV. To dlatego skanery laserowe stopniowo przełączają wstępnie skonfigurowane pola ochronne. Umożliwia to pojazdowi AGV, który "otoczony jest" polami ochronnymi na automatyczne wjechanie do stacji, przeniesienie materiału do miejsca przeładunku, a następnie ponowny wyjazd ze stacji. Dla całego cyklu zachowany jest poziom bezpieczeństwa. Zaletą tego rozwiązania jest to, że całe otoczenie przez cały czas znajduje się w polu ochronnym – mając zapewnioną kompleksową ochronę. Co do zasady tylko AGV o konturach zdefiniowanych wcześniej w systemie może znaleźć się w polu ochronnym. W celu wykrycia prób manipulacji lub niewspółosiowości skanera, Leuze wykorzystuje poziomicę wbudowaną w urządzenie, oraz dodatkowe zewnętrzne kontury referencyjne.
Możliwość wjazdu równolegle do osi ścieżki lub po łuku
Rozwiązanie bezpieczeństwa Leuze wymaga zaledwie kilku komponentów, w tym dwóch laserowych skanerów bezpieczeństwa RSL 400, które wyróżniają się doskonałą wydajnością, wytrzymałością i łatwością obsługi. Dzięki dużemu zasięgowi działania wynoszącemu 8,25 metra są one w stanie monitorować nawet duże obszary. Rozwiązanie uzupełnia oprogramowanie bezpieczeństwa Leuze oraz system sterowania Siemens SIMATIC S7. Optymalne pozycjonowanie skanera laserowego RSL 400 zależy od różnych czynników, które należy wziąć pod uwagę w zależności od zastosowania:
• Układu w danej aplikacji i potencjalnego zacienienia wynikającego z usytuowania elementów
• Specyfikacji pojazdu AGV (np. wymiarów)
• Pozycji wjazdu i wyjazdu pojazdu AGV do/z pola ochronnego
• Ścieżki transportu i prędkości pojazdu AGV w polu ochronnym (równolegle do osi scieżki i/lub po łuku)
W zależności od powyższych, wskazane może być rozmieszczenie skanerów laserowych wokół pola ochronnego ukośnie lub równolegle. W szczególnych przypadkach (np. obejmujących układy z narożnikiem, z cieniem od strony budynku lub konstrukcji komórki) może pojawić się konieczność wykorzystania w konstrukcji systemu więcej niż dwóch skanerów laserowych.
Łatwe wdrożenie
Aby wprowadzić tego rodzaju inteligentne zabezpieczenia konieczne jest spełnienie zaledwie kilku wymagań, takich jak minimalna szerokość pojazdu AGV oraz maksymalna prędkość jazdy w polu ochronnym. Dodatkowo, zakładana dokładność trasy przejazdu pojazdu AGV wynosi około 50 milimetrów. Oprócz tego, przed strefą niebezpieczną musi być zapewniona odpowiednia ilość miejsca, po to żeby:
• móc w tej przestrzeni wykonywać manewry pojazdem AGV, oraz
• aby stworzyć wystarczająco duże pole ochronne skanera (określona, minimalna odległość od źródeł zagrożeń ze wszystkich stron dostępu).
Aby zainicjować wjazd lub przejazd pojazdu AGV zainstalowany w nim system sterowania transportem materiałów musi z wyprzedzeniem zgłosić swoją trasę w systemie bezpieczeństwa. W zależności od oceny ryzyka dla danej aplikacji, w przypadku naruszenia pola ochronnego, oprócz zatrzymania komórki robota może być również konieczne zatrzymanie pojazdu AGV. Rozwiązanie to opiera się na założeniu stworzenia bezpiecznej komunikacji między komórką a pojazdem AGV.
Elastyczność w transporcie materiałów
Dzięki tej koncepcji zabezpieczania stacji przeładunkowych robotów/pojazdów AGV, operatorzy systemów otrzymują efektywny kosztowo układ, który zapewnia kompleksowe rozwiązanie bezpieczeństwa dla całego cyklu. Spełnia ono wymogi dla poziomu bezpieczeństwa PL d - zgodnie z normą ISO 13849-1, oraz SILCL 2 - zgodnie z normą IEC 62061. Oznacza to, że ryzyko wypadków można niezawodnie zminimalizować. Rozwiązanie bezpieczeństwa Leuze działa autonomicznie po zarejestrowaniu pojazdu AGV przez system prowadzenia. Oferuje ono maksymalną elastyczność, bez ograniczeń podczas transportu elementów. System bezpieczeństwa oraz pola ochronne działają w oparciu o kontur pojazdu AGV, a nie w oparciu o transportowany na nim materiał. Nawet części wystające z przodu lub po bokach są bezpiecznie transportowane. Ponadto integracja sprawia, że montaż zabezpieczeń mechanicznych, takich jak ogrodzenia i bariery, staje się zbędny. Pozwala to zaoszczędzić cenną przestrzeń produkcyjną.
Od oceny ryzyka do rezultatów
Każda firma, która chciałaby wdrożyć tą koncepcję do swoich zautomatyzowanych systemów, potrzebuje doświadczonego partnera. Ważne jest, aby w całym procesie uczestniczył dostawca systemu bezpieczeństwa. W ten sposób można opracować i wdrożyć rozwiązania dostosowane do indywidualnych potrzeb. Pierwszym krokiem jest ocena ryzyka: zagrożenia (np. w strefie robota) muszą być jasno zdefiniowane. Należy również wiedzieć, ile czasu wymaga zatrzymanie komórki robota. Na tej podstawie można określić wielkość pola ochronnego i czas trwania poszczególnych czynności. Specjaliści od czujników z firmy Leuze są doskonałym partnerem do kontaktu w tych kwestiach. Oceniają sytuację na miejscu, określają wymagania oraz opracowują koncepcję bezpieczeństwa. Po zainstalowaniu komponentów Leuze zapewnia wsparcie w zakresie opracowania odpowiedniej dokumentacji oraz parametryzacji i uruchomienia czujników. Oferta usług obejmuje również końcową walidację aplikacji. I wreszcie, co nie mniej ważne, zgodność CE zapewnia bezpieczeństwo prawne. Pozwala to firmom bez kompromisów czerpać korzyści z innowacyjnych systemów logistyki materiałowej.
